
Moteur, hélice et slogan, sur le point de se dépasser
1992/03/01 Sarriegi Eskisabel, Andoni Iturria: Elhuyar aldizkaria
L'énergie électromagnétique de l'eau de mer n'est plus fiction que les plongeurs très silencieux et ambitieux se réalisent sans moteurs ni pièces mobiles. Il ne l'est pas encore, mais des études très avancées et dans de nombreux pays. Au bout de quelques années, les découvertes sur l'impulsion magnéto-hydrodynamique (MHD) ont pris une grande importance. Le principe physique en soi est très simple et il y a déjà un siècle et demi à expliquer dans les Enseignements Moyens.
Si vous prenez un conducteur électrique comme le fil de cuivre et que vous appliquez un champ électrique, le fil traverse un courant électrique. Maintenant, murmurons dans un champ magnétique créé par un aimant et associé au champ électrique : l'influence de ces deux champs entre eux fait que le conducteur, selon la loi de Laplace/Lorenz, génère de la force électromagnétique, où la direction de la force est en outre associée au champ électromagnétique et au champ électrique. Si le fil de cuivre est libre, cette force peut provoquer un déplacement.
La valeur de cet effet est également applicable aux conducteurs liquides ou gazeux, et en particulier à l'eau de mer. En fait, étant eau salée, il est conducteur de l'électricité contrairement à l'eau douce. Par conséquent, si un bateau dispose d'un équipement avec dispositif d'application simultanée de champ magnétique et de champ électrique dans les eaux marines, l'eau souffrira de la force de Laplace/Lorenz et le bateau se déplacera, c'est-à-dire qu'il sera capable de se déplacer en avant ! Le système d'impulsion appelé MHD est donc un système d'impulsion réactif. La force exercée dans l'eau agit de réaction dans le bateau.
Alors vous pensez aussi: Si c'est quelque chose de si simple, pourquoi n'a pas été pensé et lancé avant? Oui. On a pensé, mais l'étude elle-même l'a mentionné dans sa publication vers 1960. En fait, ses résultats ont pu désespérer n'importe qui à cette époque. Le premier travail d'étude sur l'impulsion magnéto-hydro-dynamique pour des bateaux a été écrit en 1962 par un Américain appelé Phillips, et entre autres, a exprimé :
- Avec les moyens actuels d'induction magnétique, le système le plus approprié entraînerait la plongée de 600 pieds à une vitesse de 10 noeuds avec un rendement électrique de 8%. Pour obtenir des rendements et des vitesses plus élevés, il faut des zones beaucoup plus grandes.
- Ce pauvre résultat est dû à la faible conductivité de l'eau de la mer.
- Le mauvais rendement et les impulsions faibles de ce système rendent incapable de l'utiliser comme système d'impulsion.
L'eau de mer est en fait un mauvais conducteur de l'électricité. Sa conductivité est dix millions de fois inférieure à celle du cuivre et, comme l'a souligné Phillips, pour compenser cet inconvénient, des zones de grande force sont nécessaires, mais les moyens de l'époque ne les offraient pas. En raison de ces carences techniques et de leur caractère de conciergerie, les enquêtes se sont poursuivies jusqu'en 1967.
Quelques années plus tard, le sujet a été repris et il a continué à étudier, la supraconductivité a fait de grands progrès. Par ailleurs, les supraconducteurs sont des matériaux qui opposent à peine la résistance à la circulation électrique et qui admettent des densités de courant milliers de fois supérieures à celles acceptées par le cuivre lui-même. Le noyau de la clé était donc matériel.
En ce sens, une bobine super-conductrice est capable de générer un champ magnétique cent pour cent plus grand que l'électroaimant normal, et en plus sans grandes dépenses de chauffage et d'électricité par effet Joule. Ce grand champ magnétique a provoqué la révision du système d'impulsion type MHD.

Les Américains ont été les premiers à commencer au début des années 80 les travaux théoriques sur ce type d'impulsion. Ses recherches, notamment celles du laboratoire Argonpe de l'Illinois, sont coûtées par le département de la Défense et veulent être utilisées dans la plongée. Les plongeurs militaires, par exemple, sont actuellement confrontés à un problème décisif : le silence.
Ses pièces mécaniques tournantes (moteurs, hélices, axes moteurs, etc.) produisent des bruits que les systèmes de détection peuvent identifier. Par exemple, la rotation de l'hélice entraîne une réduction de pression dans une zone proche et l'eau s'évapore. Ce phénomène de vide produit un bruit spécial, important et identifiable, qui est entravé par le système d'entraînement de type MHD ; l'intérêt d'une plongée sous-marine, bien sûr, est un fonctionnement totalement silencieux, sans hélices ni pièces mobiles.
Le silence n'est pas la seule qualité du système d'impulsion type MHD. Ce mode d'impulsion permet théoriquement de circuler à des vitesses très élevées et d'obtenir des rendements énergétiques très élevés. Il offre la possibilité théorique d'éliminer toute pièce mécanique mobile, y compris la devise, ainsi que d'améliorer les rendements hydrodynamiques des navires.
Le système d'impulsion type MHD ne devrait pas se limiter aux activités militaires. Dans ce domaine, l'initiative japonaise est très importante. Et c'est que ces derniers temps, financés par de grandes sociétés privées, ils se sont mis très intensément dans un programme expérimental civil. L'Université de Kobe dispose d'une maquette d'une nouvelle équipe de moteurs de ce type.
Les anciens Soviétiques, pour leur part, ont travaillé longtemps à Riga (Lettonie) dans un centre de recherche très important dédié à la zone d'impulsion de liquides MHD. Maintenant tout cela, avec l'indépendance de la Lettonie et la profonde crise économique des républiques soviétiques, on sait, mais au moins l'a appris.
La France ne marche pas non plus en arrière. Un petit groupe travaille depuis plus de deux ans à l'Institut de Mécanique de Grenoble et, entre autres, dans le domaine des besoins spatiaux (avion spatial Hermes), l'industrie nucléaire, Madylam, fusion thermonucléaire, applications métallurgiques (plasma), supraconducteurs, électrochimie, etc. Pour cela, ils ont le soutien du grand industriel Jeumont-Schneider, du nord de la France. Initialement, cette équipe de Grenoble réalisait des travaux de synthèse théorique, consistant en une analyse exhaustive des différents types d'impulsions pour MHD.
Mais en revenant au sujet, l'impulsion comportementale dite, en fonction de l'origine décrite au début de l'article – combinaison du champ électrique et du champ magnétique, ainsi que la création de la force associée à Laplace/Lorenz – n'est pas la seule possibilité et il existe une seconde voie, l'impulsion inductive.

Comme on le sait, l'induction électrique a été découverte par Faraday vers 1830. Le champ magnétique qui se déplace et/ou change de valeur crée dans un corps conducteur l'appel courant induit. Par conséquent, le système d'impulsion par induction est d'application exclusive de cette loi. Dans l'eau de mer, un champ magnétique coulissant est produit à travers une bobine convenablement pour passer un courant alternatif.
Ce champ magnétique entraîne l'enroulement longitudinalement. Étant variable, elle génère des courants induits dans l'eau et l'interaction entre le couple magnétique/courant induit se transforme en force exercée dans l'eau, devenant suffisante pour avancer vers le navire.
En résumé, la différence entre les deux types d'impulsions est que les impulsions par conduction utilisent deux zones distinctes – le champ électrique généré par les électrodes et le champ magnétique généré par une bobine –, tandis que les impulsions par induction, le champ électrique est induit par un champ magnétique coulissant et l'absence d'électrodes (solution qui a étudié Phillips et commenté au début).
Un autre questionnaire de ce couple alternatif de conduite/induction se concentre sur les concepts suivants : si on peut faire un bateau ou une plongée pour fonctionner avec une commande en MHD ; si le champ magnétique et électrique peut être créé à l'extérieur du casque et si la force d'impulsion le rebondit autour du bateau ; ou si l'eau peut circuler le long du bateau sur ce canal.
Sur les deux voies, les moteurs peuvent être de quatre types : conduite par circulation extérieure, conduite par circulation intérieure ou par canal, induction par circulation extérieure et induction par circulation intérieure ou par canal. Nous allons comparer les caractéristiques et les conclusions de ces quatre formes et en fonction des résultats obtenus et surtout des besoins, la sélection sera possible.
Que choisir, de conduite ou d'induction?
Chaque option a ses avantages et ses inconvénients et tout dépend de demandes concrètes. Par exemple, l'induction a l'avantage de ne pas avoir d'électrodes, en évitant les problèmes de corrosion, d'électrolyse et de bruit de ce type (très intéressant pour la plongée, par exemple). Au contraire, celles à induction sont très difficiles à manoeuvrer et chaque fois qu'il faut changer de vitesse, il faut régler la synchronisation du champ magnétique en changeant sa fréquence, ce qui peut réduire la performance. La détente est également très difficile à induire. En général, la dernière est plus flexible, mais a aussi des problèmes. Il faut donc chercher la solution correspondante.
Trafic interne ou externe ?
Comparativement aujourd'hui, un avantage visuel est que la performance électrique pourrait atteindre un niveau entre 65% et 85% des autres zones disséminées dans le canal ou le canal. Cette performance, cependant, est beaucoup plus faible lorsqu'il est fait dans les zones extérieures du lapin. Car l'énergie se disperse surtout vers l'infini, "réchauffant la mer"... D'autre part, en s'éloignant un peu du casque, le champ électrique et le magnétique ne sont pas maintenus ensemble.

Un autre avantage de la circulation des canaux ou des tubes est celui du silence, très apprécié au moins dans le domaine militaire. Les champs électromagnétiques envoyés à l'extérieur du lapin émettent un signal trop facile à reconnaître. Mais le trafic intérieur a aussi des inconvénients. En fait, l'eau qui pousse le lapin à circuler dans le canal ou le conduit subit une friction ou frottement supplémentaire sur les surfaces les plus importantes mouillées et la performance hydrodynamique n'est pas aussi bonne dans ce système.
Il semble que, pour des considérations de performance, simplicité d'utilisation, etc., le système d'impulsion par conduite de canal a été promu pour l'action civile (dans le bateau rapide des Japonais mentionnés) et, au contraire, la circulation extérieure dans les essais de plongée militaire américaine et dans le projet du brave de glace à l'Université de Kobe au Japon, sans que cela signifie que l'induction ait été définitivement écartée.
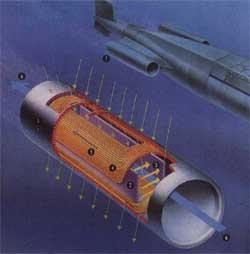
Aujourd'hui, les Japonais de l'Université de Kobe ont exposé la deuxième maquette de leur nouveau modèle de barque (figure 4) équipée d'un système d'entraînement de type MHD de 6 secteurs chacun, d'une longueur de 2,5 m et d'un diamètre de 25 cm formant des canaux ou des tubes cylindriques. Il a deux électrodes parallèles lisses et a le champ électrique associé au magnétique, circulant les eaux aux murs du lapin. Le choix de différents secteurs permet d'obtenir la meilleure efficacité du champ magnétique, en réduisant les pertes de champ magnétique dans les emplacements en anneau (4 teslas au centre des canaux).
En revanche, cette avancée de l'énergie électromagnétique est réalisée au détriment de la performance hydrodynamique. En fait, 6 canaux multiplient également le frottement avec leurs murs intérieurs. Ce lapin, construit pour démontrer l'efficacité de l'impulsion type MHD dans les lapins flottants, doit obtenir de meilleurs résultats pour atteindre des rendements économiquement intéressants.
Les Américains n'ont pas encore été en mesure de passer par la maquette de leur plongée. Au cours de plusieurs années, des études techniques ont été menées sur l'impulsion à la conduite avec une circulation interne par canaux, mais avec diverses figures géométriques. Les électrodes, les zones et les circulations présentent des représentations très complexes.
Les performances et les résultats pour chaque type sont déjà calculés. La roue pour de grands lapins subit dans le tunnel. D'une longueur de 15 m, elles sont prêtes à recréer les caractéristiques d'une véritable plongée, mais étant le moteur d'une propriété, l'eau est celle qui circule. Il semble qu'à grande échelle ils n'ont pas encore pu être dans Errenteria. Par exemple, une plongée de 200 m de long et environ 15 m de diamètre nécessiterait plusieurs dizaines de mégawatts de puissance pour se déplacer à 20 noeuds, ce qui est impossible. Par conséquent, vous avez encore beaucoup à améliorer!
Les découvertes autour de 1986 et les nouveaux surconducteurs peuvent potentiellement contribuer à améliorer les résultats du système d'impulsion dans MHD. Ces nouveaux matériaux (céramique, oxyde de cuivre, etc.) ne nécessitent pas de températures aussi basses que les alliages utilisés jusqu'à présent (-269°C) pour maintenir la supraconductivité et sa teneur en azote liquide (-196°C) est suffisante, pour sa faible facilité d'utilisation et son coût.
Cela explique le prestige des nouveaux « super » créés en 1986. Actuellement, il semble que vous pouvez utiliser de toute façon ces matériaux. Cependant, les scientifiques préfèrent attendre. Et c'est qu'ils arriveront avant ou après ce dont ils ont besoin. Par conséquent, le développement de tout cela dépend largement des super-conducteurs.
En attendant, à partir d'aujourd'hui, grâce à la plongée en MHD et aux bateaux rapides, les mêmes équipements que les surconducteurs classiques refroidis par hélium deviennent capables de rivaliser avec d'autres surconducteurs et méthodes de refroidissement, avec des bateaux à moteur.
La théorie du système d'impulsion MHD est bien comprise et les calculs sont déjà suffisamment fiables. Pour calculer sa performance en fonction de tous ses paramètres, il comprend toutes les équations d'électromagnétisme, mécanique des fluides et dynamique. En profondeur, cependant, le problème peut être résolu, au moins à moitié, avec quelques simplifications. Le champ magnétique, par exemple, n'a rien à voir avec la vitesse du lapin, bien que cette zone n'est pas constante dans la formation de l'espace. Le rendement total, c'est-à-dire entre la force motrice du lapin et l'impulsion électromagnétique qui le produit, est divisé en trois rendements partiels:
Par exemple, pour améliorer les performances d'impulsion, il est nécessaire d'améliorer la géométrie du canal ou du tube, mais cela n'affecte pas d'autres parties. La performance d'impulsion dépend également de la vitesse du lapin. Puisqu'il n'est pas possible de modifier les formes de tube, etc., en définitive la performance doit dépendre des résultats des caractéristiques techniques requises. |

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia

