
Oinezko robota ibilaldi gogorrerako prestatzen ari da
1986/08/01 Lizaso, Pili - Informatika SailaElhuyar Fundazioa Iturria: Elhuyar aldizkaria
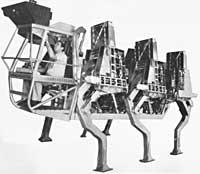
Joan den urtean Tokyon ospatutako Robotika-aurrerapenen Nazioarteko Batzarrean, oinezko robota izan zen hardware-piezarik harrigarriena.
Robot haul egokitutako suspentsio-ibilgailu bezala ezagutzen da (ASV, adaptive suspension vehicle) eta EEBBetako Ikerketa-projektu aurreratuen Defentsarako Agentziak eskainitako 5 milioi dolarreko laguntzaz eraikia izan zen.
ASVk, hiru konkorreko gamelu eta moja-mantilaren arteko nahastura dirudi. Baina Kenneth Waldron-ek, Ohio State Unibertsitateko robots eraiki zuen taldeko buruak dioenez "... oinezko ibilgailuen artean inoiz egindako saiakuntzarik sofistikatuena dugu".
Ibilgailu hau lur zakarretan zehar ibiltzeko diseinaturik dago. Gurpildun ibilgailuekiko tresna honen abantaila, oztopo handi baten aurrean gainetik pasatzeko erraztasuna izatea da.
ASV, hiru metro zabaleko erretenak eta bi metro altuko oztopoak saihestu gabe pasatzeko gai dela pentsatzen da.
Gorputzaz gainera, garrantzi handikoa da dispositibo sentsoreak edukitzea. "Sentsore optiko bat edukitzea, ez zaizu probetxagarriegia gertatuko seinalatzen ari den norantza ezagutzen ez baduzu" dio Waldon-ek.
ASVk 5 metroko luzera du, 2,72 tona pisatzen du eta 90 kilo garraiatzeko gai da.
50 Kilowatteko ziklomotoreen motore egokitu baten bidez ibiltzen da eta orduko 3 kilometroko abiadura lor dezake.
Ibilgailu honen kabinaren goikaldeko radar optiko batek adierazten dio gidariari norantz doan.
Galio artsenurozko laser batek izpi infragorri bat sortzen du, ispilu mekanikozko sistema batean isladatu eta ibilgailuaren aurreko aldea aztertzen du. Isladatutako izpi infragorri hauek funtzio-bakarreko bost konputagailuz aztertzen dira. Beste funtzio-bakarreko 10 konputagailuek koordinatzen dute hanken higidura, gida-agintetik datozen aginduak irakurri eta kabinako pantailetara informazioa bidaliz.
Kabinaren goikaldean bi pantaila daude. Ezkerrekoak, une oroz lurrean dauden hankak zeintzuk diren adierazten du. Eskuinekoak berriz, hanka guztien egoera zehatza.
ASVren eraikuntza burutu eta martxan jartzeko, Waldron eta bere taldeak arazo tekniko batzuk konpondu behar izan zituzten. Arazo handienetariko bat independenteki higitzen den pieza-multzo handi bat, eraginkortasun handiz eta kontrol oneko ahalmenez hornitzea izan zen.
"Eraginkortasun handia lortu beharra duzu; ahalmenez hornitu behar bait duzu zeure burua" dio Waldron-ek.
Aurten, software-modulu guztiak prest daudenean, ASVk sei eragiketa-mota izango ditu, arlo desberdinetan bere helburuak betetzeko. Honetarako zera behar da: pauso zehatza eragileak hanka bakoitza kontrolpean duenean, zirkuitu itxiko mekanismo bat, non tresnaren konputagailuak hanka bakoitza bideratzen bait du; erabat automatizatutako mekanismo bat, non hanken segida aurretik definitu gaberik bait dago, lurraren arabera aldatzen delako; lur zakarretan zehar azkarrago ibiltzeko pentsatua dagoen mekanismo gurutzatu bat, eta bultzada-mekanismo bat, zeina osoki hartuz mekanismo gurutzatuaren antzekoa bait da, baina sentsoreen informazio-zati bat alde batera utzirik ibilgailua abiadura handiagoz higi erazten du.
ASVren eraikuntza Maiatzean burutu zen. Burutu aurreko astean bere hanka indibidualak lehen aldiz higitu ziren. Hasieran frogak mahai gaineko sistema baten bidez egin ziren. Hala eta guztiz ere, aurten guztiz automatizatua izango da.

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia

