
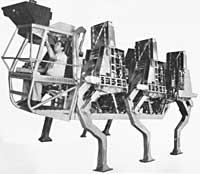
Le robot à pied se prépare pour une promenade difficile
1986/08/01 Lizaso, Pili - Informatika SailaElhuyar Fundazioa Iturria: Elhuyar aldizkaria
Lors de la Conférence internationale sur les progrès en robotique tenue l'année dernière à Tokyo, la pièce de matériel la plus frappante était le robot à pied.
Le robot haul est connu comme véhicule de suspension adapté (ASV, adaptive suspension vehicle) et a été construit avec l'aide de 5 millions de dollars offert par l'Agence pour la défense des projets de recherche avancés aux États-Unis.
ASV semble un mélange entre le chameau de trois concaves et la mantille de religieuses. Mais Kenneth Waldron, chef du groupe qui a construit les robots de l'Université Ohio State, assure que c'est l'essai le plus sophistiqué jamais réalisé parmi les véhicules à pied ».
Ce véhicule est conçu pour circuler sur des terrains labourés. L'avantage de cet outil avec des véhicules à roues est la facilité de passer au-dessus d'un obstacle majeur.
On considère que l'ASV est capable de passer sans éviter des fossés de trois mètres de largeur et des obstacles de deux mètres de hauteur.
En plus du corps, il est important d'avoir des capteurs d'appareil. « Avoir un capteur optique ne vous sera pas très utile si vous ne connaissez pas la direction indiquée », explique Waldon.
ASV a une longueur de 5 mètres, pèse 2,72 tonnes et est capable de transporter 90 kilos.
Il fonctionne avec un moteur adapté de cyclomoteurs de 50 kilowatts et peut atteindre une vitesse de 3 kilomètres par heure.
Un radar optique situé en haut de la cabine de ce véhicule indique au conducteur le sens de sa marche.
Un laser d'arsenure de gallium produit un faisceau infrarouge qui se reflète dans un système de miroirs mécaniques et analyse l'avant du véhicule. Ces rayons infrarouges réfléchis sont analysés par cinq ordinateurs à fonction unique. Les 10 autres ordinateurs à fonction unique coordonnent le mouvement des jambes, lisant les commandes de guidage et envoyant des informations aux écrans de cabine.
Au sommet de la cabine, il y a deux écrans. Celle de gauche indique les pattes sur le sol à tout moment. Celui de droite est l'état exact de toutes les jambes.
Pour achever et lancer la construction d'ASV, Waldron et son équipe ont dû résoudre un certain nombre de problèmes techniques. L'un des problèmes majeurs a été la fourniture d'un grand nombre de pièces détachées indépendamment, avec une grande efficacité et un bon contrôle.
"Vous devez obtenir une grande efficacité, vous devez vous doter de capacités", dit Waldron.
Cette année, lorsque tous les modules logiciels sont prêts, ASV disposera de six types d'opérations pour atteindre ses objectifs dans différents domaines. Pour cela, il est nécessaire que le passage concret lorsque l'opérateur a chaque jambe sous contrôle, un mécanisme en circuit fermé dans lequel l'ordinateur de l'utile canalise chaque jambe; un mécanisme entièrement automatisé, dans lequel la succession des jambes n'est pas prédéfinie, car il dépend de la terre; un mécanisme croisé conçu pour circuler plus rapidement sur des terrains rugueux, et un mécanisme de poussée, qui dans son intégralité est similaire au mécanisme croisé, mais plus rapide des capteurs.
La construction d'ASV a eu lieu en mai. La semaine précédant la réalisation, ils ont déplacé leurs jambes individuelles pour la première fois. Initialement, les tests ont été effectués via un système de bureau. Cependant, cette année sera entièrement automatisée.

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia

