
Robots manuals amb persones
2013/07/01 Lakar Iraizoz, Oihane - Elhuyar Zientzia Iturria: Elhuyar aldizkaria
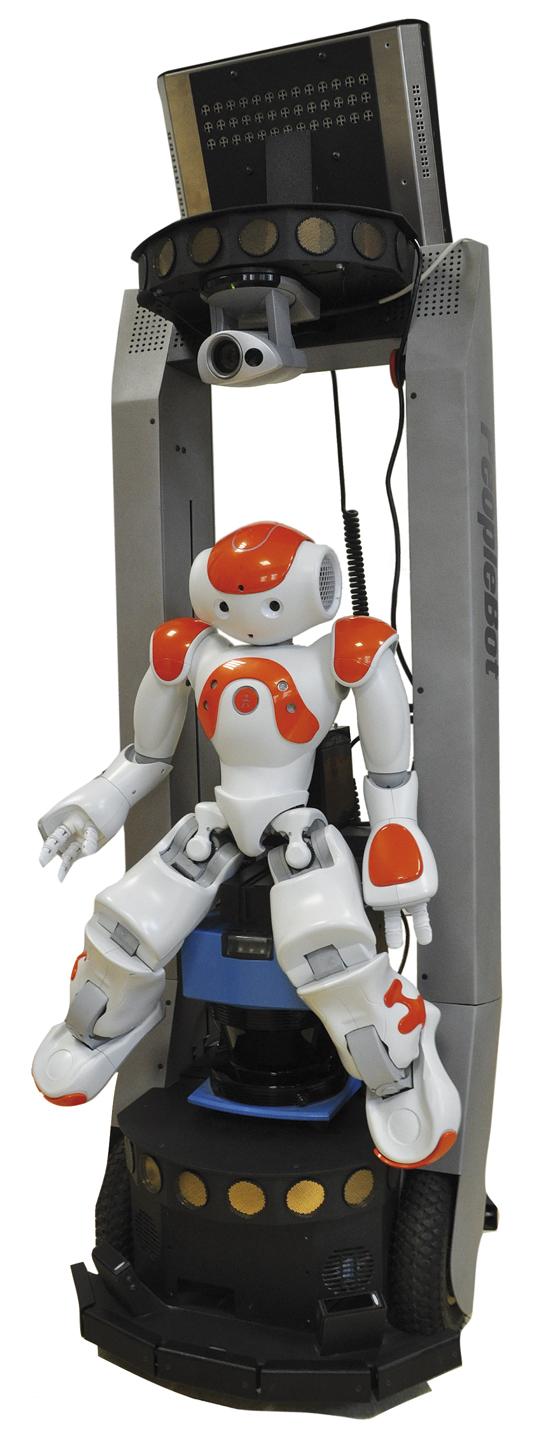
Eureka acaba de començar a muntar gent! L'últim robot que han creat en IK4-Tekniker en el Museu de la Ciència. Quan hi ha un esdeveniment, el comunica al públic i condueix fins allí, o realitza visites guiades explicant les exposicions exposades. Un robot pensat per a interactuar directament amb les persones.
És més habitual que els robots es dediquin a activitats industrials. No obstant això, en general, el seu nivell d'automatització és limitat. "Nosaltres volem arribar més enllà", explica Urko Esnaola, investigador que treballa amb robots en la divisió d'Indústria i Transports de Tecnalia. La introducció de la robòtica avançada en la indústria permetria "unir --afegeix Esnaolak-- els avantatges dels robots, com la força, la precisió i la capacitat de repetició contínua de tasques, amb les característiques humanes que els robots no poden tenir. Les persones tenim capacitat d'adaptació. Som capaços, per donar un exemple senzill, d'agafar els caragols en qualsevol posició i col·locar-los en la posició correcta en la peça corresponent. Doncs bé, conjuminant les habilitats de tots dos, volem augmentar la producció mitjançant la posada en marxa de robots i persones".
En la mateixa línia va l'investigador de la unitat de Sistemes Autònoms i Intel·ligents d'IK4-Tekniker, Loreto Susperregi: "El nostre objectiu és que les persones facin tasques que aportin valor afegit al producte o procés i automatitzin tasques de baix valor, que puguin suposar un risc o un perjudici per a la salut". Els centres de recerca tenen com a objectiu aconseguir una indústria més competitiva, i compten amb onze projectes per a oferir recursos robòtics.
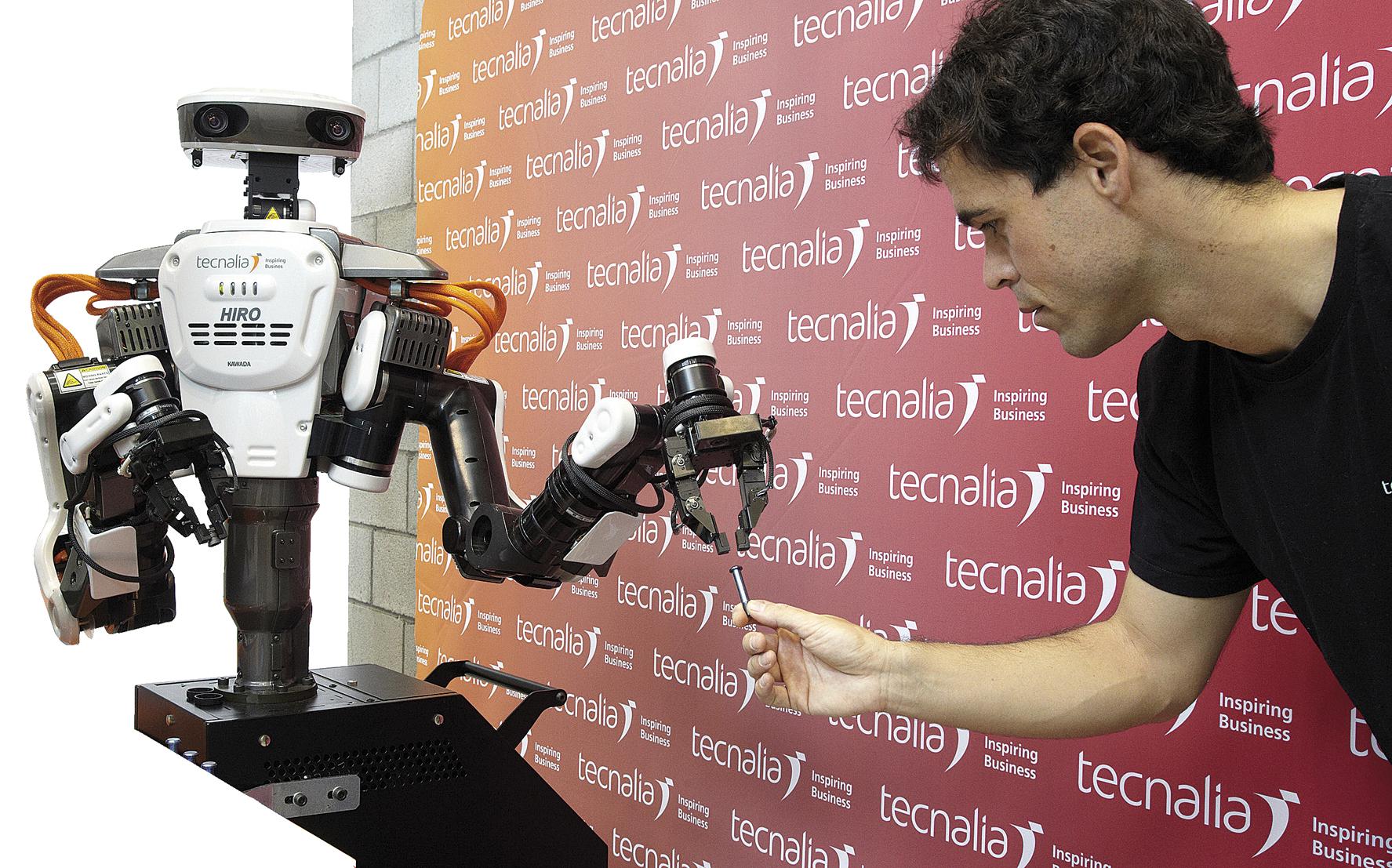
Exemple d'això són el robot Hiro de Tecnalia i el desenvolupat en el projecte Robofoot d'IK4-Tekniker. El primer s'està desenvolupant per al fabricant d'avions Airbus, concretament per a l'operació de col·locació de reblons en les ales dels avions. "Fins ara una persona col·loca els reblons en els orificis i una altra els ataca amb una màquina. Perquè de moment hem aconseguit automatitzar el primer pas", aclareix Esnaola. Han aprofitat aquesta aplicació per a “verificar i demostrar en quina mena d'aplicacions es pot utilitzar un robot d'aquest tipus”, ha afegit. Amb aquest desenvolupament han aconseguit el premi European Manufacturing Award 2012.
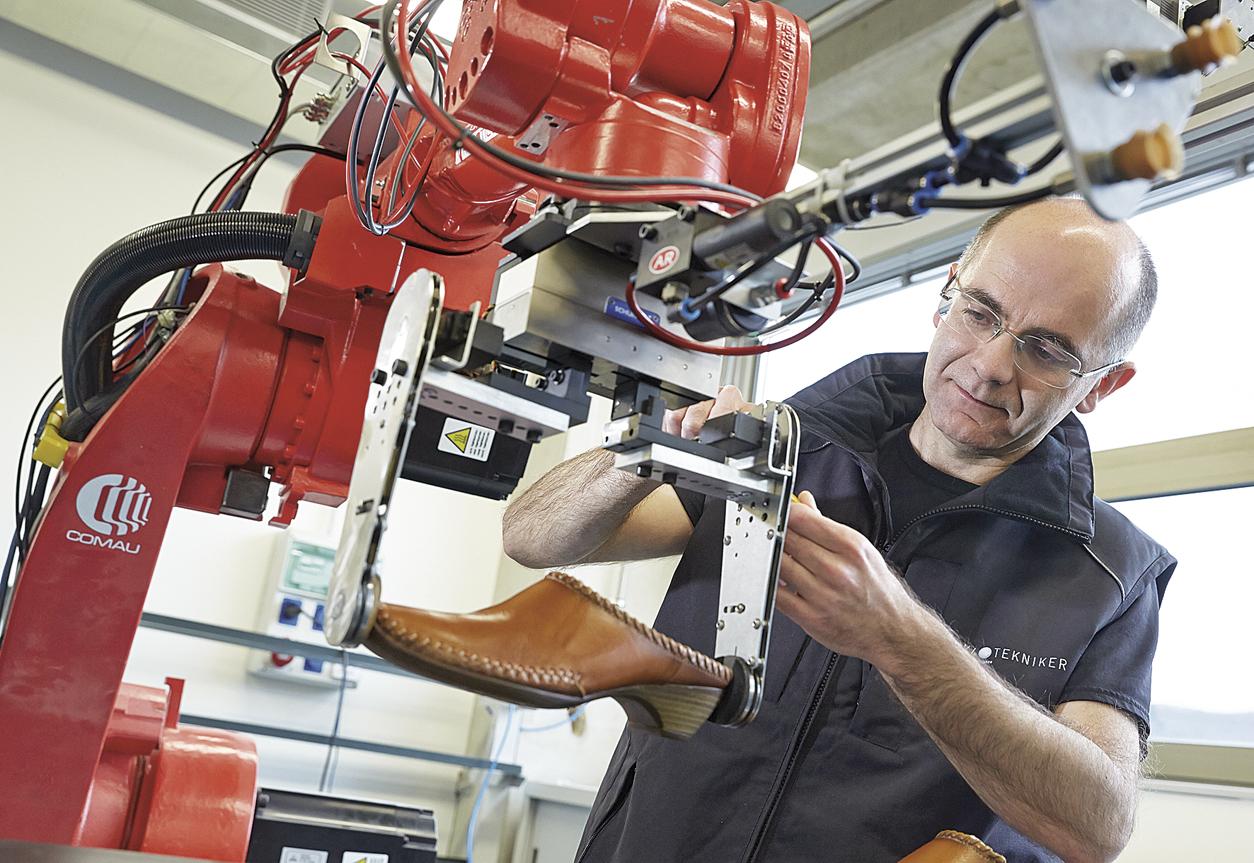
D'altra banda, en el projecte Robofoot, IK4-Tekniker va voler provar si era possible la penetració del robot en el sector del calçat. "Iniciem aquest projecte perquè es tracta d'un sector tradicional que encara no té el robot en el seu procés de fabricació", explica Iñaki Maurtua, director de la Unitat de Sistemes Autònoms i Intel·ligents d'IK4-Tekniker. "L'objectiu va ser robotitzar algunes de les tasques de fabricació, com l'escatat, encolat, abrillantat, tenyit i forma, suport per al muntatge de sabates, obertura. També es pot utilitzar per a fer la inspecció una vegada acabats les sabates i per a ficar les sabates en les caixes". El projecte ha comptat amb la col·laboració de l'empresa de sabates Pikolinos, que l'han provat en el seu procés de fabricació, i "hem demostrat que és possible introduir l'automatització en aquest sector sense grans esforços econòmics".

Robots fora de gàbies
Amb l'objectiu que els robots treballin amb les persones, els investigadors afirmen que el primer que cal aconseguir és que els robots i les persones comparteixin el mateix espai. "Ara els robots treballen encaixats en gàbies en la indústria i ningú pot entrar en ella perquè és perillós", explica Esnaola. Les normes de seguretat són molt estrictes. No obstant això, a mesura que la tecnologia avança, "les normatives també estan en procés de canvi; diran quines mesures han de complir els robots i les persones perquè estiguin col·laborant", explica Susperregi.
Gràcies als sensors i càmeres que s'estan desenvolupant, els robots poden ser capaços de reconèixer a les persones i evitar així el risc de tocar amb elles. Així mateix, els robots hauran de ser capaços de superar les barreres que puguin fer les persones. Per a això, els investigadors també estan desenvolupant la intel·ligència: "Si el robot va d'un punt a un altre i troba algun obstacle en el camí, ha de ser capaç de canviar la seva trajectòria i dirigir la seva planificació", explica Susperregi.
Intuïtivament, sembla fàcil de fer, "perquè els humans som molt bons adaptant-nos als canvis --destaca Esnaola-. Però introduir alguna cosa semblança a la intuïció en els robots és un gran repte, ja que tot ha de programar-se".
Així mateix, es pretén que l'intercanvi entre robots i persones sigui el més senzill possible i que el robot disposi de sistemes més intuïtius. "L'objectiu és que el robot no sigui alguna cosa que ens espanti perquè no sabem usar-ho", diu Esnaola.
La major part del treball a realitzar per a aconseguir-lo es troba en la programació. Segons Esnaola, "la clau és introduir al robot un major nivell d'intel·ligència perquè funcioni millor. A vegades també hem d'introduir el maquinari perquè el robot necessita una cambra millor per a una tasca concreta, o perquè necessita uns ganxos diferents per a agafar les peces". Però els investigadors bascos treballen sobretot amb el programari: "creem comportaments intel·ligents amb els senyals dels sensors que tenen els robots", explica Maurtua.
Per exemple, el robot d'Eureka! està ple de sensors per a poder detectar tot el que li envolta. "Ha estat un gran repte poder navegar robots envoltats de gent. I és que la gent es mou, no és com una taula estancada, alguna cosa que una vegada percebut només cal evitar --diu Susperregik-. A més, és molt important que el robot sàpiga si el que té davant és una persona o no, per a tenir un comportament intel·ligent, és a dir, per a no començar a parlar a una paret".
En contacte amb les persones, Susperregi aclareix que de moment el robot té una interacció unidireccional: "parla a qui es troba davant, però no és capaç d'escoltar ni comprendre el que aquesta persona li pot dir". No obstant això, aquesta tecnologia s'està desenvolupant i integrarà "quan estiguem convençuts que funciona correctament".
Bertsos
El repte és dotar als investigadors de capacitat d'escolta. En definitiva, "l'àudio és una ona sonora amb ones i buits de freqüència determinada. Doncs bé, recollint aquestes freqüències, el robot ha de derivar lletres i d'aquí, la paraula, i en identificar una successió de paraules, ha de resoldre el seu significat". Elena Lazkano, membre del Grup de Recerca en Robòtica i Sistemes Autònoms de la UPV/EHU, explica aquest fet. "Hi ha eines per a altres llengües, però el basc té moltes particularitats, i en això estem treballant", diu. La seva creació més coneguda és el bertsolari Tartalo, desenvolupat en col·laboració amb el Grup IXA de la UPV.
La veritat és que com gairebé tots els robots esmentats (Eureka! excepte el del museu), el propi robot no ha estat construït per ells, sinó per la intel·ligència que té darrere; en aquest cas, ser capaç de fer bertsos. Així, igual que Tartalo, poden posar en bertsos altres robots. Entre altres coses, han realitzat algunes sessions amb l'últim robot que han entrat en l'equip: Amb Nao.
L'equip de la UPV-EHU va optar pel bertsolarismo com a tema de desenvolupament de capacitats per als robots, “perquè el bertsolarismo és una afició a la qual ens agrada, d'una banda, i per un altre, perquè permet treballar en diferents àmbits de la robòtica, com la navegació i l'exploració, comprendre i interioritzar els temes que se li proposen i generar una resposta a això. Tot això, a més, amb una expressió corporal adequada, és a dir, expressant que està pensant, actuant com bertsolaris, etc.", explica Basilio Sierra.
A més de treballar la interacció entre persones i éssers humans, consideren que la posada en bertsos dels robots és una bona manera de mostrar a la societat el treball que estan realitzant. No obstant això, aquesta tecnologia desenvolupada pot ser també d'utilitat per a altres serveis, com “si és conductor d'un museu, per a atendre les persones que acudeixen a parlar, o per a portar als pacients a la consulta que volen acudir a un hospital”, explica Sierra.
Estètica, imprescindible
En haver de relacionar-se amb les persones, l'aspecte dels robots és un tema molt important, segons els investigadors. Lazkano afirma que "els éssers humans tenim facilitat per a comunicar-se amb els éssers humans, per la qual cosa podem començar a parlar amb un robot humanoide com Nao més que amb un artefacte de ferro com Tartalo. Per tant, si volem atreure a la gent al món de la robòtica, hem d'oferir-li una cosa atractiva".
Encara que la importància de l'ús de robots humanoides s'està estenent últimament, "al Japó porten 10 anys desenvolupant aquest tipus de robots -diu Urko Esnaolak--. A Europa ens hem centrat més en els robots industrials". Precisament per això, Esnaola està realitzant una estada en el laboratori JSK de la Universitat de Tòquio per a continuar desenvolupant el robot Hiro. El mateix Hiro és humanoide des de la cintura cap amunt, ja que encara que està dissenyat per a ajudar en la indústria, l'objectiu és col·laborar amb les persones.
Eureka! el robot per al museu de la ciència no ha estat vist com a humà, però "hem cuidat molt l'estètica", explica Susperregi. Lazkano suggereix que s'assembla al robot Eva de Wall-e, a l'inrevés. En el transcurs de la prova es van realitzar diverses sessions per a veure la reacció de la gent davant aquesta situació i Susperregi recorda que una vegada se li va acostar un jove i li va preguntar si volia ser el seu amic. "Al cap i a la fi, la gent respon davant els robots i, davant l'aparença, espera tenir un comportament determinat", afirma.

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia


