
La nouvelle ère des systèmes spatiaux dans la topographie et la géodésie
2007/02/01 Bastarrika Izagirre, Aitor - Kartografia eta Geodesia ingeniaria eta Topografia Ingeniaritza Teknikoko irakasleaEHU | Elgezabal Otsoa De Txintxetru, Aitziber - EHUko Topografia Ingeniaritzako irakaslea | Artano Perez, Karmele - EHUko Topografia Ingeniaritzako irakaslea Iturria: Elhuyar aldizkaria

Pour pouvoir localiser et représenter les éléments de la Terre, la topographie doit connaître la forme et les dimensions de la Terre, qui est ce que la science de la géodésie offre.
Changements dans les dernières décennies
Les premiers progrès en topographie et en géodésie ont eu lieu après la Seconde Guerre mondiale. Ils développèrent alors une grande quantité d'électronique, mécanique, optique, mathématiques, physique... qui révolutionnèrent les sciences géomatiques, dont la topographie et la géodésie, développant de nouvelles méthodes et outils. Ces méthodes réalisent la mesure électronique de la distance et des angles à partir des ondes électromagnétiques. Par la suite, le développement de l'informatique a permis le développement de logiciels pour la gestion des données mathématique et géographique, permettant la réalisation automatique de calculs manuels complexes.
La révolution suivante est venue de la main des satellites. Depuis les années 70, l'utilisation de satellites artificiels a entraîné d'énormes avantages dans la topographie et, surtout, dans la géodésie. En fait, en plus de placer précisément des points très éloignés les uns des autres, la géodésie spatiale a ouvert de nouvelles possibilités pour étudier la forme de la Terre, la géodynamique de la Terre et la force de gravité. Sans aucun doute, nous pouvons affirmer que nous sommes méthodologiquement devant une révolution : dépassés les classiques de la géodésie et de la topographie, les systèmes spatiaux GNSS (Global Navigation Systems) ont ouvert de nouveaux chemins, tant dans les travaux topographiques conventionnels que dans les travaux et les recherches de géodésie.
Localisation Localisation
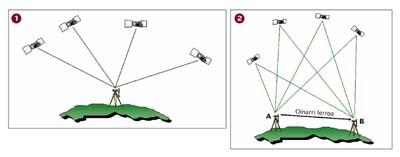
Comprendre comment l'emplacement de l'utilisateur est déterminé par des systèmes spatiaux est relativement simple. Les coordonnées de localisation (X,Y et Z) sont calculées par la méthode de trilatération.
La trilatération est une méthode courante en topographie. Avec cette méthode, en mesurant la distance entre un point comme le point A et trois points fixes avec des coordonnées connues, on peut obtenir les coordonnées de position du point A (X, Y et Z).
Dans les systèmes spatiaux, les points connus sont les satellites, et la position du récepteur est connue en mesurant la distance de l'endroit où se trouve le récepteur aux satellites. Les satellites émettent continuellement des signaux radio et, pour calculer la distance, on mesure le temps écoulé du satellite au récepteur et on multiplie par la vitesse de la lumière. Il est dit que c'est un système passif, car les récepteurs ne reçoivent que des signaux. Grâce à ce système, des millions de personnes peuvent connaître leur emplacement simultanément.

Pseudo-distance et mesures par phase
Pour mesurer la distance entre le récepteur et les satellites, il existe deux méthodes : la mesure avec code et la mesure en phase.
Dans la mesure du code, en plus du signal, le satellite envoie un code modulé à une fréquence d'onde déterminée. Par corrélation de ce code on peut connaître le temps que prend le signal pour arriver au récepteur, et en multipliant cette donnée par la vitesse de la lumière on réussit à connaître la distance entre le satellite et le récepteur. Cette mesure de distance est appelée pseudo-distance. Les récepteurs de navigation indiquent, par exemple, les récepteurs utilisés dans les véhicules et en montagne. Cette méthode permet d'obtenir une précision à l'emplacement de 15-30 mètres.

Cependant, la précision de 15-30 mètres est clairement inacceptable pour la géodésie et la topographie, dans lequel une précision de quelques millimètres et centimètres est nécessaire. Ainsi, dans ces cas, les distances du satellite au récepteur sont mesurées par la phase d'onde. Les mesures par phases sont basées sur la vague elle-même et non sur les codes modulés. Et comme la longueur d'onde de l'onde est de quelques centimètres, la distance peut être mesurée beaucoup plus exactement et vous pouvez obtenir un emplacement exact. Cependant, la mesure par phase présente un obstacle majeur. Bien que le décalage des ondes puisse être facilement connu dans le signal qui atteint le récepteur, il n'est pas si facile de connaître le nombre total de cycles. C'est le problème de l'ambiguïté du cycle. Pour le comprendre, il y a un XIX. Un bon exemple du XXe siècle.
XIX États-Unis. Les compteurs des Grandes Plaines (Great Plain) du XVIIIe siècle mesuraient les terrains publics qui traversaient les champs ouverts de la manière suivante: dans un chariot rempli de pierres ou de pieux trois personnes allaient; l'une conduisait le chariot; l'autre, avec une boussole, maintenait le chariot dans l'orientation à suivre; et la dernière, comptait le nombre de tours qu'elle avait joints à un morceau de tissu. Quand le tissu faisait autant de tours qu'un mile, ils mettaient une pierre ou un pieu et allaient de l'avant.
Le système de positionnement par satellite est équivalent à la personne qui mesure le nombre de tours de la roue, avec la différence que lorsque vous montez sur le chariot vous tomberez derrière et vous dormez. Quand vous vous réveillez, vous vous inquiétez et commencez à essayer de comprendre la distance; vous savez qu'à ce moment la roue est au milieu de la tournée, mais vous ne savez pas combien de tours complets vous avez donné. C'est le cas de l'ambiguïté du cycle: le récepteur connaît le décalage, mais pas le nombre de cycles complets.
Le nombre total de cycles est calculé à l'aide d'algorithmes, qui ont considérablement amélioré ces dernières années : en peu de temps (en quelques secondes ou en quelques minutes) ils peuvent connaître le nombre de cycles. Pour le calcul du nombre total de cycles, ces algorithmes doivent contenir au moins des données instantanées d'un autre récepteur. Ainsi, avec un seul récepteur, on ne peut connaître que la pseudo-distance.
Localisation différentielle par phase
L'emplacement différentiel est basé sur le fait que les signaux qui arrivent aux deux récepteurs souffrent des mêmes erreurs. Les satellites étant à environ 20.000 kilomètres, les signaux émis par eux doivent faire un long voyage à travers l'ionosphère et la troposphère pour atteindre le récepteur, dans lequel ils subissent une série de changements ou d'erreurs.
On peut supposer que ce voyage est le même pour les deux récepteurs, de sorte que le signal satellite aura la même erreur dans les deux récepteurs, ce qui permet d'obtenir le vecteur entre les récepteurs avec une précision énorme (précision en millimètres à dix kilomètres). A partir de là, et étant l'un des deux récepteurs placé dans un point de coordonnées connues (fixé exactement sur un trépied, sur le point), on calcule la position du second récepteur : en connaissant les coordonnées exactes de l'origine du vecteur, on peut connaître avec précision les coordonnées du deuxième point du vecteur.
Cette méthode permet de réaliser le calcul de l'emplacement après les observations, à la fois au bureau et au moment. La localisation actuelle est appelée RTK (Real Time Kinematic). Dans les travaux effectués par RTK, le récepteur situé en coordonnées connues (appelée base) envoie en temps réel les données obtenues du satellite à l'autre récepteur (appelé mobile), généralement par signaux radio. Comme ce signal radio a une portée limitée, vous ne pouvez pas trop éloigner le mobile de la base, jusqu'à 30 kilomètres s'il n'y a pas d'obstacles entre eux. Cependant, ces dernières années, les données recueillies dans la base sont également envoyées via GPRS en profitant des réseaux étendus de téléphones mobiles.

GPS, GLONASS et Galileo
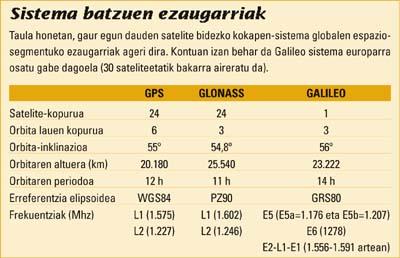
Il existe actuellement deux systèmes de positionnement par satellite disponibles : GPS et GLONASS. Un troisième, Galileo, commence à être construit.
Le premier était le GPS, créé par le Département de la Défense des États-Unis à des fins militaires. La constellation NAVSTAR constitue le système GPS. Le système GLONASS, pour sa part, a été créé par le Service Soviétique de Défense et ensuite cédé à l'Agence Spatiale Russe. Ils, en plus de donner un usage militaire, renforcé l'usage civil, mais très tard, de sorte qu'aujourd'hui, il est utilisé moins que le GPS. Cependant, en s'appuyant sur les services militaires, aucun d'eux n'assure un signal permanent.
Galileo sera le système européen de navigation par satellite. Ce système fournira une grande précision et, en s'appuyant sur le contrôle civil, garantira de façon permanente un service global de positionnement. Galileo est une initiative de l'Union européenne et de l'Agence spatiale européenne. Il s'agit d'une constellation de 30 satellites : le premier satellite (et le seul pour le moment) a été lancé le 28 décembre 2005.
De plus en plus de récepteurs peuvent recevoir le signal du GPS et du système GLONASS. Certains récepteurs utilisés en topographie et géodésie, par exemple, permettent d'utiliser les deux systèmes, augmentant le nombre de satellites et améliorant la précision.

Avantages et avenir des systèmes spatiaux
Le système global de positionnement et de navigation par satellite offre de grands avantages en géodésie et topographie.
Les méthodes classiques utilisées jusqu'à présent ont permis d'obtenir la position d'un point, il est donc nécessaire de garantir la visibilité entre un point connu et celui que l'on voulait placer. De leur côté, les systèmes de positionnement global par satellite permettent d'obtenir une position entre points non visibles, car on peut obtenir des lignes de base de dizaines ou centaines de kilomètres avec précision en centimètres. De plus, contrairement à ce qui se passe jusqu'à présent, les systèmes mondiaux de positionnement par satellite permettent de réaliser des mesures dans n'importe quelle situation climatique.
Dans le domaine de la topographie, lors des soulèvements, la fertilité a considérablement augmenté dans les travaux effectués par le système satellite. Dans la topographie conventionnelle, deux personnes sont nécessaires pour effectuer les travaux, tandis qu'avec les systèmes de positionnement par satellite seulement une personne peut travailler et, en outre, gagner des points par jour.
Ils ont également des limites. Le plus important est de travailler dans des endroits qui rendent difficile le signal des satellites: obstacles supérieurs, bâtiments et arbres, comme par exemple, détruisent le signal des satellites et, dans de nombreux cas, il est impossible d'obtenir leur localisation. Pour l'avenir, cependant, lorsque le système Galileo est disponible, l'augmentation des satellites permettra de dépasser cette limite en plusieurs endroits.

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia


